特斯拉股东大会定档6月3日,5月20日公司已提前发布了引人瞩目的宣传视频,特斯拉人形机器人有望在2024年第三或第四季度开启预售。此外,2024年下半年,世界人工智能大会和世界机器人大会等重大论坛将相继举行,将为人形机器人行业带来密集的催化效应。
在特斯拉人形机器人的硬件构成中,触觉传感器是关键的传感器零部件,能够为人形机器人提供数据输入,通过将外部刺激如压力、振动和热刺激转化为传感元件的变化,从而完成机器人的感知过程。
根据GGII的预测,到2030年全球人形机器人领域对于柔性触觉传感器或电子皮肤的需求将达到152.5万平方米,市场规模预计会扩大至274亿元。
触觉传感器行业概览
触觉传感器是机器人感知环境的关键部件,能够直接检测机器人与环境之间的各种交互作用,如接触力、温度以及接触物体的材质、软硬程度等特性。
触觉传感器的逼真程度主要取决于是否具有柔性,这决定了它能否更真实地模拟人类的触觉感知能力。
在触觉传感器的工作过程中,触觉传感器阵列发挥核心作用。
触觉传感器阵列能够将各种物理信号,如波形转换成电流或电压波形,这些电信号随后通过数字电路进行精确处理,并以电磁波的形式进行传输。在传输完成后另一个传感器会接收这些信号,并将其转换成机器人系统可以理解和使用的信号形式,从而实现对环境的全面和精准感知。
特斯拉Optimus的每只手指都配备柔性触觉传感器:

资料来源:特斯拉
触觉传感器主要分为柔性和刚性两大类,其中刚性传感器以微机电系统(MEMS)为主。
根据工作原理的差异,触觉传感器又可以分为压阻式(也称电阻式)、电容式、电感式、压电式、光电式、摩擦电式以及视觉式等多种类型。
压阻式传感器是目前的主流产品,具有高灵敏度和强大的过载承受能力。但是也存在一些缺点,如压敏电阻的漏电流稳定性较差、体积较大难以实现微型化、功耗高、容易受到噪声干扰,以及接触表面较为脆弱等。
对于人形机器人来说,为了实现更为精细的操作,多维触觉传感器被认为是未来的发展方向。
柔性传感器能够覆盖在机器人机体表面,具有可伸缩、可弯曲的特性,是触觉传感器的理想形式。柔性传感器还具有优异的机械性能和生物相容性。
此外,柔性传感器还能测量动态或形状变化的物体。即便是在受到一定程度的弯折或拉伸后,传感性能依然保持稳定。
具有高柔弹性的电子皮肤触觉传感器阵列能够模仿甚至超越人类皮肤的感觉功能,能够有效地实现机器人的触觉感知。
高柔弹性的仿生电子皮肤触觉传感器阵列:
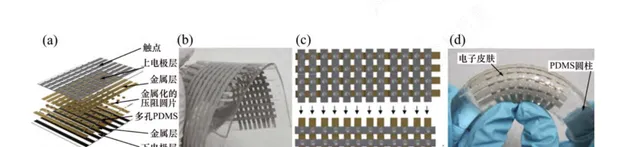
数据来源:【机器人柔弹性仿生电子皮肤研究进展】
电子皮肤的材料必须满足轻薄、柔软的特性,还应具备可拉伸性。电子皮肤可以覆盖在人形机器人的多个部位,使用的柔性基体材料包括聚二甲基硅氧烷和聚偏氟乙烯等。
根据柔性传感器的特性和实际应用需求,其常用材料主要包括柔性基底、碳材料以及无机半导体材料等。
柔性触觉传感器竞争格局和龙头梳理
当前全球柔性传感器仍然处于发展的初级阶段。在技术研发以及产业链构建等方面都还有一定的壁垒。
市场格局方面来看,全球前五大厂商占据了大约55%的市场份额,国外主要布局企业包括GelSight、Canatu和Novasentis等。
国内方面,柔性传感器的国产化率在持续提高。国内涉足柔性触觉传感器的相关企业包括帕西尼感知、苏州能斯达(汉威科技控股)、力感科技、钛深科技、埔慧科技、慧闻科技、中科纳芯以及墨现科技等。
代表厂商中,帕西尼感知科技拥有前沿的触觉核心技术和自动化技术,公司产品包括多维度触觉传感器PX-6AX、消费级触觉传感器PX-3A、触觉灵巧手Dexp,以及人形机器人Tora。其中,PX-6AX是由来自日本早稻田大学机器人实验室的帕西尼感知科技团队开发。
帕西尼Dexp产品示意图:

资料来源:帕西尼
汉威科技成立于1998年。2013年公司完成了对苏州能斯达的控股,从而开始进军柔性传感器业务。苏州能斯达由国家杰出青年科学家和中科院知名海归科学家团队共同创立,技术实力雄厚。苏州能斯达建立了稳定的纳米敏感材料体系,此外公司还掌握了柔性压阻、柔性压电、柔性温湿度和柔性电容四大核心技术。
结语
整体而言,尽管柔性传感器仍处在初始阶段,但近几年在我国市场呈现快速增长的趋势。随着人形机器人和人工智能等新兴行业加速发展,以及国内制造业的升级和智能化需求增加,柔性传感器将在更多的领域大有可为,市场有望迎来更加广阔的发展空间。
关注【乐晴行业观察】,洞悉产业格局!











