售价在3000元以上的主流中高端扫地机器人,已经能够满足绝大多数家庭全屋地面清洁需求,但在家庭清洁的长期使用过程中,即使是一线品牌的旗舰扫地机器人,也会存在以下两个最为突出的清洁难题。
一是清洁死角。
墙角/家具边缘长时间未清洁形成的卫生死角,需要人工定期补扫补拖;
二是毛发缠绕。
长头发/宠物毛发缠绕滚刷,几乎每2~3次全屋清洁后就要人手动清理滚刷;
AVC的相关调研数据也表明,用户尤其关注扫地机器人对卫生死角的清洁能力,以及主机缠绕留污处理能力。 近期上市的科沃斯新品T30扫地机器人,主打卖点是清洁无死角和毛发0缠绕,正是瞄准用户对于清洁死角的有效覆盖和毛发防缠绕的诉求。

一、为什么科沃斯T30能够做到最强地面清洁覆盖?科沃斯T30清洁死角实测
1、对比一般的机械臂技术,科沃斯T30的边角清洁能力如何?
扫地机器人的主动贴边清洁方案目前主要有两种,甩尾贴边和机械臂外扩贴边。
甩尾贴边, 即扫地机器人依靠甩动机身(扭屁股),实现拖布贴近物体边缘,优点是清洁下压力和摩擦力大,对墙边顽固污渍的清洁表现出色,缺点是机器甩尾过程会造成部分区域的遗漏,形成断断续续的污渍残留,清洁效率偏低,并且对于拐角处的贴边污渍无法有效覆盖;
机械臂外扩贴边, 即扫地机器人在贴边清洁时主动向外伸出机械臂,使拖布贴近物体边缘,优点是无需扭动机身,清洁效率高,贴墙清洁无断点;
机械臂外扩贴边的缺点是拖布伸出手下压力不足,并且在转角和桌椅腿等复杂场景下,外扩机械臂容易发生误撞,所以主流机械臂扫地机器人都会在采取更保守的贴边清洁策略,转角处停顿并完全收回机械臂,虽然减少了机械臂误撞概率,但完全收回的机械臂拖布无法覆盖转角处污渍,进而造成较明显的清洁死角。
不同于一般的机械臂技术,搭载灵隙灵动恒贴边技术的科沃斯T30, 无论是沿墙处的直线贴边区域、拐角位置,还是桌椅腿林立的餐桌区域,以及不规则的杂物边缘,都能够实现圆盘拖布始终保持在贴边位置 ,在保证机器和拖布尽可能不碰撞物体的前提下,圆盘拖布最大限度地贴近边缘,持续覆盖全屋地面边角处的清洁,并且配置的下压力电机能够维外扩后的拖布提供恒定的下压力,提升拖布对边缘顽固污渍的清洁效果;
2、 科沃斯T30的圆盘拖布,是如何实现清洁全程持续贴边的呢?
首先是机械臂的灵活悬停。 一般的机械臂技术只能实现简单的伸和缩两个动作,因此在机器遇到转角时,只能将圆盘拖布收回避免碰撞,造成转角处的清洁死角。

而 科沃斯T30采用无级悬停设计的机械臂结构,圆盘拖布能够停留在拖布完全伸出和完全收回的任意位置,无论是机器转向角度多大,科沃斯T30的圆盘拖布始终保持伸出的清洁进攻姿态,而不是采取拖布完全收回的避障防守姿态;
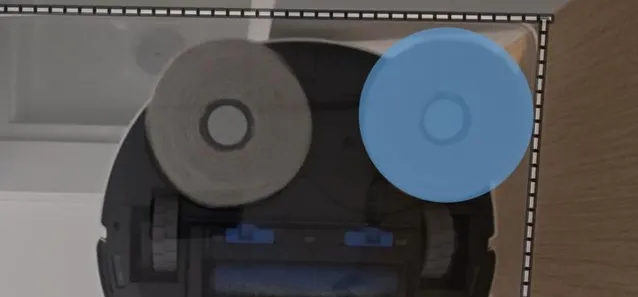
通过慢动作和底部透明视角,观察科沃斯T30在转角处的机械臂动作,我们也可以看出科沃斯T30在应对90°沿墙内角时,机身转动的同时,机械臂并没有完全收回拖布,而是 在机身转动的过程中,机械臂根据机身姿态动态调整拖布圆盘的伸出位置,拖布和沿墙的两条直角边出于相切位置,此时拖布能够最大限度探入并清洁沿墙内角处的污渍。
其次是复杂环境的精准感知。 通过3D结构光精确感知障碍物的高度和深度,国考侧面的沿边传感器持续辅助LDS激光雷达精准测距,消除LDS的测距偏差,经过几何算法准确推算出拖布圆盘位置上的沿边距离,无级悬停悬停机械臂根据环境信息和沿边距离,动态调整拖布盘的悬停位置,进而实现高效覆盖和精准避障的兼顾。
拖布位置的复杂变化,虽然能够提升沿墙清洁的覆盖率和清洁率,但也会大大增加全局清洁的路径规划难度。贴边清洁演示中,可以看出科沃斯T30的拖布外扩贴边清洁过程中,在内外两侧拖布圆盘之间,会形成明显的未清洁区域(贴边清洁后之后科沃斯T30主动补扫覆盖), 因此全局路径规划的算法,尤其是对于漏拖区域的补扫/补拖,是确保全屋所有区域的有效覆盖的关键。
在倾斜的椅子腿附近洒上咖啡粉,测试科沃斯T30在复杂环境下的全局清洁效果,尤其是贴边清洁和路径补扫能力。
 https://www.zhihu.com/video/1736892425715585025
https://www.zhihu.com/video/1736892425715585025
实测科沃斯T30对于椅子腿附近区域的清洁效果出色,针对椅子腿还会进行环绕清洁,全局清洁过程中也没有出现漏扫情况。












