關註並星標
從此不迷路
電腦視覺研究院
公眾號ID | 電腦視覺研究院
學習群 | 掃碼在主頁獲取加入方式
電腦視覺研究院專欄
Column of Computer Vision Institute
目前,基於衛星影像的多類別船舶檢測和分類由於在軍事和民用領域的重要套用而備受關註。
01
前景概要
在今天分享中,我們團隊在FUSAR船舶數據集和SimpleCopyPaste方法的基礎上生成了一個新的
Artificial-SAR-Vessel
數據集中。我們進一步提出了一種新的多類船檢測,稱為CRAS-YOLO,它由摺積塊註意力模組(CBAM)、感受野塊(RFB)和基於YOLOv5s的自適應空間特征融合(ASFF)組成。CRAS-YOLO改進了基於路徑聚合網絡(PANet)的特征金字塔網絡,該網絡整合了RFB特征增強模組和ASFF特征融合策略,以獲得更豐富的特征資訊,並實作多尺度特征的自適應融合。同時,在骨幹中增加了CBAM,以準確定位船只位置,提高檢測能力。
結果證實,CRAS-YOLO模型的準確度、召回率和平均準確度(mAP)(0.5)分別高達90.4%、88.6%和92.1%。所提出的模型在另一個Sar船舶檢測(SSDD)數據集中的精度、召回率和mAP得分分別高達97.3%、95.5%和98.7%,也優於先前的研究結果。
02
專案背景
如今,深度學習已經突破了傳統目標檢測演算法的瓶頸,成為檢測的主流演算法。 深度學習方法不需要在SAR影像中分離海洋和陸地,只需要透過標記的數據集進行訓練,在目標檢測方面具有很大的優勢。目前流行的目標檢測演算法有兩種類別。一種是基於區域推薦的兩階段目標檢測演算法,其中代表性的方法有基於區域的摺積神經網絡(R-CNN)、Fast R-CNN和Faster R-CNN。其主要思想是利用選擇性搜尋方法來生成建議區域,然後在建議區域中進行回歸分類。另一種是一階段目標檢測演算法,它將檢測問題簡化為回歸問題,只需要摺積神經網絡就可以直接獲得目標的類概率和位置座標。代表性演算法包括YOLO、SSD 、Retina-Net等。YO LO系列演算法通常比其他演算法更快,對小目標檢測效果良好。它們是經典的一階段檢測方法,通常比其他演算法具有更快的辨識速度,並且在小目標檢測中表現出優異的檢測能力。
迄今為止公開釋出的上述SAR船舶探測數據集大多只包含船舶位置數據,缺乏船舶類別數據。同時,唯一一個名為SRSDD的公共多類別船舶檢測數據集存在嚴重的類別不平衡問題,嚴重影響了船舶檢測的準確性。因此,我們在研究中,基於FusarShip數據集和HAISI-1衛星拍攝的海面遠端合成孔徑雷達(SAR)影像的組合,生成了一個新的數據集,稱 為Artificial-SAR-Vessel據集。 創新性地將SimpleCopyPaste方法引入到數據集的構建中,希望對SAR船舶檢測數據集進行補充,為船舶檢測數據缺乏的問題提供新的解決方案。
03
新研究框架介紹
我們研究的CRAS-YOLO是為了在給定SAR影像的情況下,在精確定位船只位置和提高檢測能力方面提供高效能而形成的。下圖中的流程圖顯示了所提出的CRAS-YOLO是如何開發的。
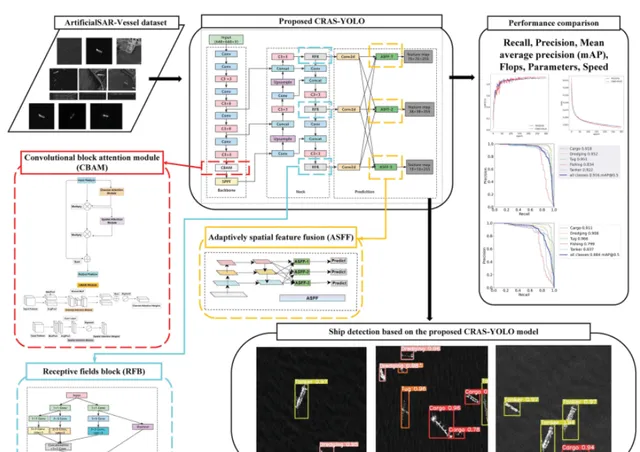
首先,生成了Artificial-SAR-Vessel 數據集。其次,透過在YOLOv5s網絡中添加CBAM、RFB和ASFF,形成了所提出的CRAS-YOLO模型。接下來,給出了效能度量,以評估所提出的模型與其他模型相比的效能。最後,將所開發的CRAS-YOLO模型套用於基於衛星影像的船舶探測。
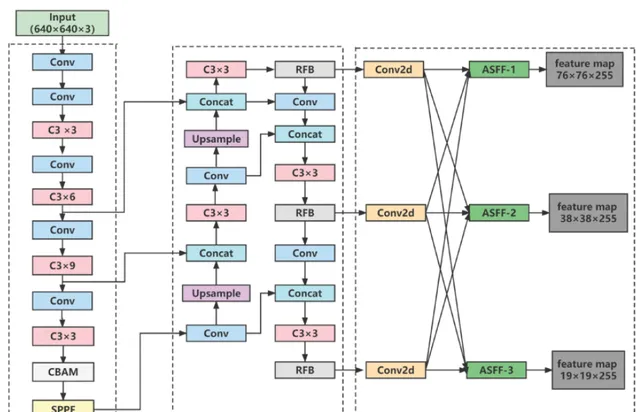
在我們的研究中,提出的CRAS-YOLO船舶檢測和分類模型基於YOLOv5s,透過在PANet(RA PANet)中添加RFB和ASFF來改進FPN,以獲得更豐富的特征資訊,並實作多尺度特征的自適應融合。擬議的CRAS-YOLO還將CBAM整合到網絡的頸部。CRAS-YOLO的完整網絡結構如下圖所示。
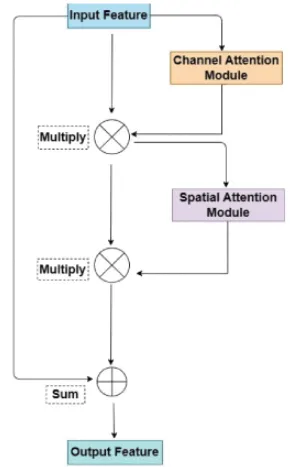
註意機制主要包括空間註意和渠道註意。SE和ECA是渠道關註機制的代表。CA是空間註意機制的代表。CBAM融合了通道和空間註意力機制,具有良好的效能。我們將CBAM插入頸部結構中,以實作更有效的特征提取。從下圖中,CBAM透過通道模組和空間模組提取特征資訊,並使用序列結構融合特征資訊。
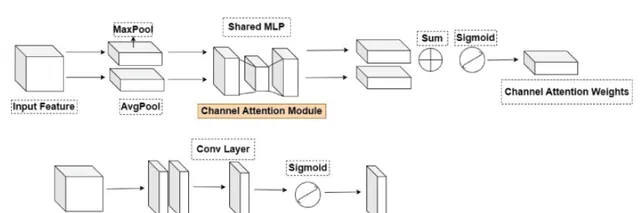
從下圖中,首先,輸入特征圖透過通道模組生成通道權重,並將獲得的權重與輸入相乘以生成通道圖。接下來,將通道特征圖匯入空間模組以生成空間權重,並將權重與匯入的特征圖相乘以生成空間圖。最後,將最終的加權特征圖和原始輸入逐元素相加,得到最終的輸出結果,詳細的CBAM結構如圖所示。
淺層濾波器提取的特征包含更具體的特征資訊。因此,我們在淺層整合了CBAM,以從淺層特征圖中學習和選擇重要特征,提高船舶的定量效能。
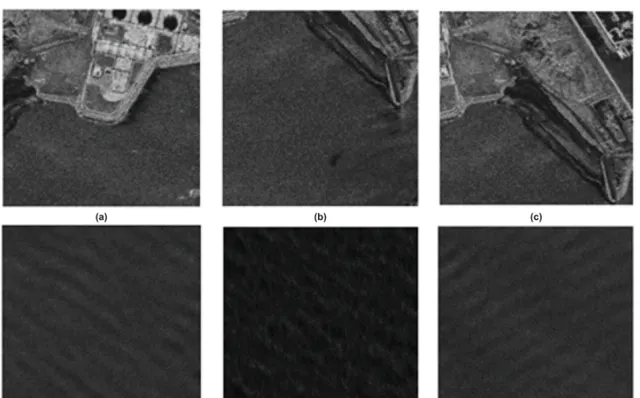
SAR影像特征圖的視覺化。(a) 透過濾波器從RA PANet的骨幹網絡中提取的特征圖的視覺化。(b) 從淺層到深層的小型船舶特征圖的視覺化。
圖片上傳失敗,請稍後重試
重試
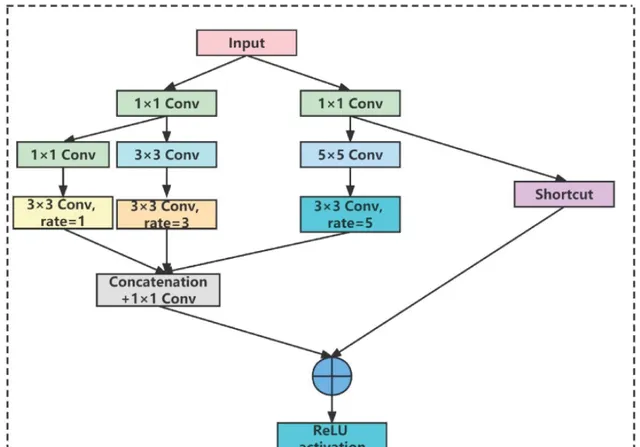
RFB特征增強模組網絡結構
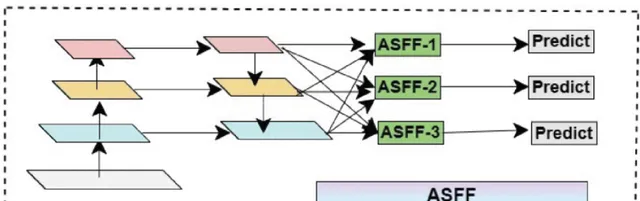
ASFF網絡結構
04
實驗及視覺化
CRAS-YOLO與其他模型的實驗結果比較

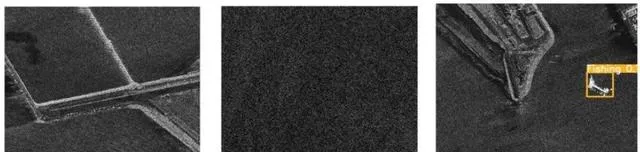
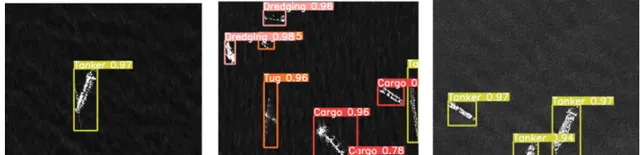
基於CRAS-YOLO模型的船舶檢測結果:上面三張分別是復雜海岸背景下的船舶測試結果,下面三張分別是深海中稀疏分布的船舶測試成果。
© THE END
轉載請聯系本公眾號獲得授權
電腦視覺研究院學習群等你加入!
ABOUT
電腦視覺研究院
電腦視覺研究院主要涉及深度學習領域,主要致力於目標檢測、目標跟蹤、影像分割、OCR、模型量化、模型部署等研究方向。研究院每日分享最新的論文演算法新框架,提供論文一鍵下載,並分享實戰專案。研究院主要著重」技術研究「和「實踐落地」。研究院會針對不同領域分享實踐過程,讓大家真正體會擺脫理論的真實場景,培養愛動手編程愛動腦思考的習慣!
🔗











