售價在3000元以上的主流中高端掃地機器人,已經能夠滿足絕大多數家庭全屋地面清潔需求,但在家庭清潔的長期使用過程中,即使是一線品牌的旗艦掃地機器人,也會存在以下兩個最為突出的清潔難題。
一是清潔死角。
墻角/家具邊緣長時間未清潔形成的衛生死角,需要人工定期補掃補拖;
二是毛發纏繞。
長頭發/寵物毛發纏繞滾刷,幾乎每2~3次全屋清潔後就要人手動清理滾刷;
AVC的相關調研數據也表明,使用者尤其關註掃地機器人對衛生死角的清潔能力,以及主機纏繞留汙處理能力。 近期上市的科沃斯新品T30掃地機器人,主打賣點是清潔無死角和毛發0纏繞,正是瞄準使用者對於清潔死角的有效覆蓋和毛發防纏繞的訴求。

一、為什麽科沃斯T30能夠做到最強地面清潔覆蓋?科沃斯T30清潔死角實測
1、對比一般的機械臂技術,科沃斯T30的邊角清潔能力如何?
掃地機器人的主動貼邊清潔方案目前主要有兩種,甩尾貼邊和機械臂外擴貼邊。
甩尾貼邊, 即掃地機器人依靠甩動機身(扭屁股),實作拖布貼近物體邊緣,優點是清潔下壓力和摩擦力大,對墻邊頑固汙漬的清潔表現出色,缺點是機器甩尾過程會造成部份區域的遺漏,形成斷斷續續的汙漬殘留,清潔效率偏低,並且對於拐角處的貼邊汙漬無法有效覆蓋;
機械臂外擴貼邊, 即掃地機器人在貼邊清潔時主動向外伸出機械臂,使拖布貼近物體邊緣,優點是無需扭動機身,清潔效率高,貼墻清潔無斷點;
機械臂外擴貼邊的缺點是拖布伸出手下壓力不足,並且在轉角和桌椅腿等復雜場景下,外擴機械臂容易發生誤撞,所以主流機械臂掃地機器人都會在采取更保守的貼邊清潔策略,轉角處停頓並完全收回機械臂,雖然減少了機械臂誤撞概率,但完全收回的機械臂拖布無法覆蓋轉角處汙漬,進而造成較明顯的清潔死角。
不同於一般的機械臂技術,搭載靈隙靈動恒貼邊技術的科沃斯T30, 無論是沿墻處的直線貼邊區域、拐角位置,還是桌椅腿林立的餐桌區域,以及不規則的雜物邊緣,都能夠實作圓盤拖布始終保持在貼邊位置 ,在保證機器和拖布盡可能不碰撞物體的前提下,圓盤拖布最大限度地貼近邊緣,持續覆蓋全屋地面邊角處的清潔,並且配置的下壓力電機能夠維外擴後的拖布提供恒定的下壓力,提升拖布對邊緣頑固汙漬的清潔效果;
2、 科沃斯T30的圓盤拖布,是如何實作清潔全程持續貼邊的呢?
首先是機械臂的靈活懸停。 一般的機械臂技術只能實作簡單的伸和縮兩個動作,因此在機器遇到轉角時,只能將圓盤拖布收回避免碰撞,造成轉角處的清潔死角。

而 科沃斯T30采用無級懸停設計的機械臂結構,圓盤拖布能夠停留在拖布完全伸出和完全收回的任意位置,無論是機器轉向角度多大,科沃斯T30的圓盤拖布始終保持伸出的清潔進攻姿態,而不是采取拖布完全收回的避障防守姿態;
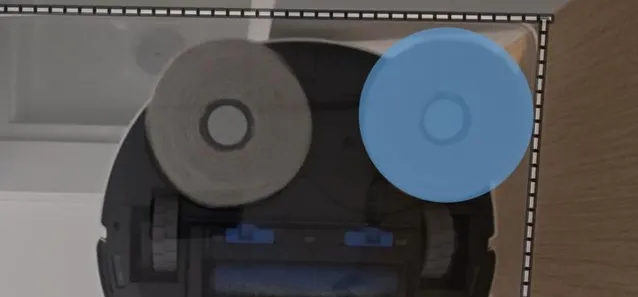
透過慢動作和底部透明視角,觀察科沃斯T30在轉角處的機械臂動作,我們也可以看出科沃斯T30在應對90°沿墻內角時,機身轉動的同時,機械臂並沒有完全收回拖布,而是 在機身轉動的過程中,機械臂根據機身姿態動態調整拖布圓盤的伸出位置,拖布和沿墻的兩條直角邊出於相切位置,此時拖布能夠最大限度探入並清潔沿墻內角處的汙漬。
其次是復雜環境的精準感知。 透過3D結構光精確感知障礙物的高度和深度,國考側面的沿邊傳感器持續輔助LDS激光雷達精準測距,消除LDS的測距偏差,經過幾何演算法準確推算出拖布圓盤位置上的沿邊距離,無級懸停懸停機械臂根據環境資訊和沿邊距離,動態調整拖布盤的懸停位置,進而實作高效覆蓋和精準避障的兼顧。
拖布位置的復雜變化,雖然能夠提升沿墻清潔的覆蓋率和清潔率,但也會大大增加全域清潔的路徑規劃難度。貼邊清潔演示中,可以看出科沃斯T30的拖布外擴貼邊清潔過程中,在內外兩側拖布圓盤之間,會形成明顯的未清潔區域(貼邊清潔後之後科沃斯T30主動補掃覆蓋), 因此全域路徑規劃的演算法,尤其是對於漏拖區域的補掃/補拖,是確保全屋所有區域的有效覆蓋的關鍵。
在傾斜的椅子腿附近灑上咖啡粉,測試科沃斯T30在復雜環境下的全域清潔效果,尤其是貼邊清潔和路徑補掃能力。
 https://www.zhihu.com/video/1736892425715585025
https://www.zhihu.com/video/1736892425715585025
實測科沃斯T30對於椅子腿附近區域的清潔效果出色,針對椅子腿還會進行環繞清潔,全域清潔過程中也沒有出現漏掃情況。












